Le passage du moteur pas à pas au moteur à courant continu à contrôle de position est un enjeu majeur dans de nombreuses industries. Dans ce cadre, notre projet a pour but de convertir un moteur pas à pas standard NEMA17 en un moteur à contrôle de position plus performant. En utilisant des composants de haute qualité comme le microcontrôleur STM32F4 et des capteurs de position tels que le codeur AS5600, cette carte permet d’obtenir un contrôle de position ultra-précis, offrant ainsi des performances optimales pour des applications nécessitant un haut degré de précision dans la commande du moteur.
Cette solution est particulièrement intéressante car elle permet d’obtenir un couple plus élevé que les servo moteurs classiques. En effet, contrairement à ces derniers, qui peuvent parfois présenter des limitations en termes de couple à basse vitesse ou sous charge, un moteur pas à pas converti en servo moteur peut délivrer un couple constant et plus important, même à des vitesses réduites.
La conception de la carte : Un projet de conversion de haute précision
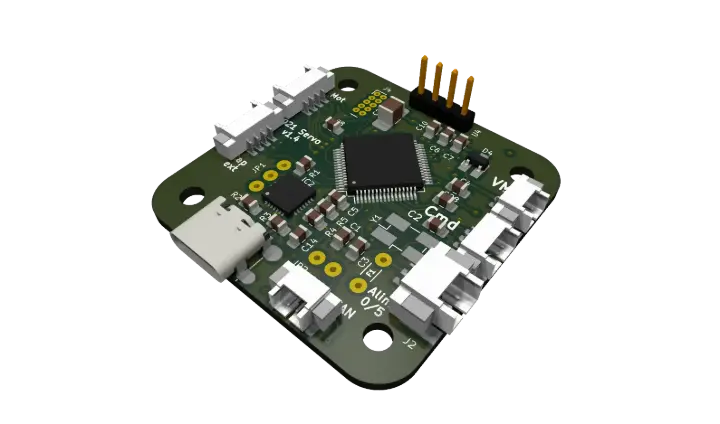
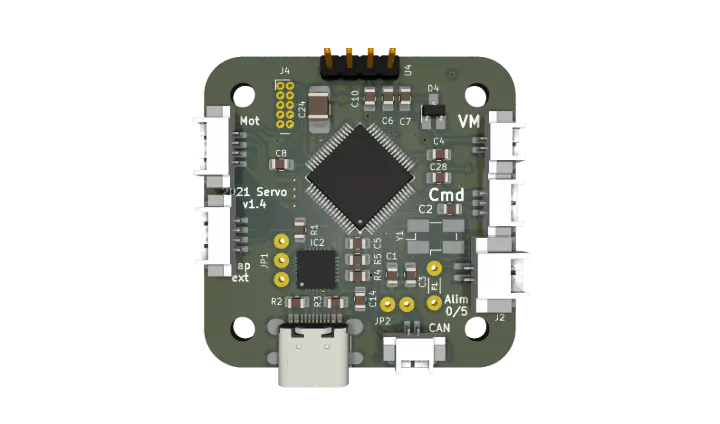
La carte que nous avons conçue pour cette conversion de moteur pas à pas en servo moteur repose sur des composants hautement fiables et puissants, assurant un contrôle précis et une flexibilité optimale pour l’utilisateur final.
Fonctionnalités principales :
- Le microcontrôleur STM32F4 constitue le cœur du système et permet un traitement rapide et précis des signaux pour un contrôle optimal du moteur.
- Un contrôleur de moteur pas à pas intégré assure la gestion en micro-pas, offrant ainsi un déplacement fluide et une grande précision dans les mouvements.
- Un codeur magnétique mesure avec exactitude la position angulaire du moteur, ce qui permet de mettre en œuvre une régulation en boucle fermée pour un positionnement fiable en temps réel.
- La carte dispose d’une entrée PWM permettant une commande externe simple, compatible avec de nombreux systèmes de contrôle.
- Une interface CAN Bus est intégrée pour assurer la communication dans des environnements industriels ou robotiques, avec gestion des consignes, de la configuration et du retour de position.
- Un port USB permet la configuration et la programmation du moteur via un ordinateur, tandis qu’un écran OLED optionnel peut afficher en direct les paramètres comme la position, la vitesse ou l’état du système.


La flexibilité de la carte :
L’une des caractéristiques importantes de cette carte est sa flexibilité. Grâce à son connecteur pour codeur additionnel et à la possibilité de commander le moteur par PWM, via USB ou par CAN Bus, elle peut facilement être adaptée à une grande variété d’applications robotiques, CNC, ou de contrôle de mouvement.
De plus, la carte a été conçue pour correspondre au format d’un moteur NEMA17, ce qui la rend très compacte et permet une intégration directe à l’arrière du moteur. Cette conception tout-en-un réduit l’encombrement et simplifie le montage, ce qui en fait une solution particulièrement pratique pour les systèmes embarqués.
Conclusion
La carte que nous avons développée offre une solution idéale pour améliorer la performance des moteurs pas à pas, en les transformant en servo moteurs plus puissants, plus économes en énergie, et plus précis. Ce projet démontre notre expertise en conception électronique et en développement de solutions sur mesure, adaptées aux besoins spécifiques de chaque client.